原始GAN
训练过程:
- 初始化generator和discriminator
- 在每一轮迭代中:
- 首先固定生成器 $G$,然后更新判别器$D$;这时候,$D$学会对真实目标打高分,生成目标打低分;
- 固定判别器$D$,然后更新生成器$G$;这时候,生成器(通过梯度上升)学习如何欺骗判别器;
训练过程公式版:
Initialize:初始化$D: \theta_d$,$G:\theta_g$;
Each Iteration:
- Learning $D$ :1. 采样$m$个实例样本;2. 采样$m$个噪声样本$z^{(1…i)}$;3. 得到生成数据$\tilde x^i = G(z^i)$;4. 更新判别器$D$的参数来最大化:
- Learning $G$ :1.采样$m$个噪声样本;2.更新生成器参数$\theta_g$ 来最大化:
Structured Learning
含义:机器学习是找到一个函数$f:X \rightarrow Y$,回归输出一个标量,分类输出一个类别,而结构化学习输出一个序列,一个矩阵,一个图或树等,这些输出由具有依赖性的组件(component)组成。
带来的学习挑战:机器学习算法需要学会做规划(planning),因为输出组件之间具有依赖性,所以应该全局地去考虑生成它们。
从这个角度去分析的话,生成器像自底向上的方式,学习在组件级别上生成目标;判别器像自顶向下的方式,学习评价全部的对象,找到最好的那一个。
生成器$G$:是一个神经网络,它定义了一个分布$PG(x)$,分布中的数据由此组成$x=G(z)$;为了拟合真实数据分布$P{data}$,我们可以写:
虽然不知道分布$PG(x)$还有$P{data}$,但是我们可以从中采样来近似它们。上面的目标函数与训练线性回归二分类器完全相同。
判别器$D$:目标函数如下,但是$G$已经固定:
训练$D$,当散度越小,越难判断出真伪:
- 生成器的优点:即使使用深度模型也很容易生成
- 生成器的缺点:组件之间的相关性很难学习;模仿的是外观;
- 判别器的优点:从大局考虑
- 判别器的缺点:生成并不总是可行的,尤其是当您的模型很深入时;如何生成比较真的负样本,因为过于假的样本通常得分很低;
Conditional GAN
原始GAN:输入:条件$c$还有噪声$Z$,得到伪造图片$x=G(c,z)$,$x$作为判别器$D$的输入得到该$x$是真假的一个判断值,但看到上面的这个过程没有利用输入的条件$c$。
条件GAN:不同在于输入判别器$D$的为:条件$c$还有$x$,判断$x$是否为真 + 判断$c$还有$x$是否匹配。比如输入判别器的为(文本:”火车”,图像: 火车的照片)。有的其他论文也通过把$x$输入$D$,然后把$D$的输出与条件$c$作为另一个神经网络的输入,两个网络输出同时来做判断。
Stack GAN
17年的ICCV工作,输入一段文本向量,它朝着两个网络输入:第一个:在第一层通过条件增强(CA:conditional augmentation)后输入生成器$G_1$做摘要(sketch),上游采样(upsampling)后得到伪造图片,然后输出判别器$D_1$。第二个:输入生成器$G_2$做提纯(refinement),上游采样后得到伪造图片,结合真实图片输入到判别器$D_2$.
Patch GAN
对图片的一个小局部做生成对抗。
Unsupervised Conditional Generation
使用特点:在没有成对数据的情况下将对象从一个域转换到另一个域,如style transfer。
李老师介绍了很多论文中GAN的设计结构,下面记录下。
这通常有两种方法:
第一类方法:直接从定义域$X$到$Y$的迁移$G_{X\rightarrow Y}$;
第二类方法:编码的方法,去投影到隐层只保留语义信息,$X\rightarrow \mathrm{Encoder}_X\rightarrow \mathrm{AttributeLayer}\rightarrow \mathrm{Decoder}_Y \rightarrow Y$
第一类方法:
最早的直接做法:把$X$直接输入$G_{X\rightarrow Y}$里产生一个类似的$\hat Y$,结合一个真正来自$Y$域的输入,一起放到判别器$D_Y$做训练。
缺点:$\hat Y$ 完全把$X$的特征消除了,太过于类似$Y$了。
发现简单的生成器$G$更容易保持原来的域特性,而根本的解决办法是新的GAN架构,比如CycleGAN,多域迁移的starGAN。
Cycle GAN
结构是$X\rightarrow G{X \rightarrow Y} \rightarrow \hat Y \rightarrow G{Y\rightarrow X} \rightarrow \hat X$,然后重构损失 :$L=\mathrm{(\hat X,X)}$。
同时$\hat Y$ 会输入判别器$D_Y$ ;
同时对于域$Y$的样本,有$Y\rightarrow G{Y \rightarrow X} \rightarrow \hat X \rightarrow G{X\rightarrow Y} \rightarrow \hat Y$,然后重构损失 :$L=\mathrm{(\hat Y,Y)}$。
同时$\hat X$会输入判别器$D_X$;
总的来看,从开始到结束,是遵从所谓的周期一致性(Cycle Consisitency)。
第二类方法:
基本上是编码器的使用,如双层编码器,输入$X1$经过上层编码器$\mathrm{Encoder}_X$编码后会放到下一层解码器$\mathrm{Decoder}_Y$,然后输出结果在输入下层判别器$D{Y}$。
GAN Theory
给定一个数据分布$P{data}(x)$(可以从里面采样),设一个带参分布$P_G(x;\theta)$,目的是为了找到$\theta$使得$P_G(x;\theta)\approx P{data}(x)$ ;比如可以假设$P_G(X;\theta)$是一个混合高斯分布。
推理的flow是这样的:先从$P_{data}(x)$中采样${x^1,x^2,…,x^m}$,由此计算$P_G(x^i;\theta)$,生成样本的似然函数为:
最大化似然函数来找寻$\theta^{\ast}$:
生成器$G$用神经网络来定义概率分布$P_G$,最优的$G^{\ast}$目标函数是:
怎么计算这个散度?
虽然不知道$PG$与$P{data}$,但是可以先从这里面采样,其中$P{data}$采集于训练样本,$P{G}$采集于正态分布,
这些样本输入到判别器$D$,用sigmoid函数对输出做二分类,目标函数是一个二分类损失函数(binary cross-entropy),其中$G$已经固定了:
- 给定了$G$,也就有了负样本,这时候训练判别器$\max_{D}V(G, D)$
因此可以看出来,给了$x$,最后的$D^{\ast}$最大化$f(D)$:
求导得到如下:
把这个公式带入原来的$V(G, D)$得到:
其中用的的$JS$散度公式为:
更新完了一轮判别器,开始更新生成器的参数 :
其中判别器部分可以视为关于$G$的函数: $L(G)=\max_DV(G,D)$,由此得到训练GAN的过程如下:
最小化损失函数$L(G)$,其中这里的$L(G)$是带有$\max$ 运算符号的,它的每次求解都是把对应最大函数值的函数段拿来做损失更新计算:
- 给定初始的$G0$,找到$D_0^{\ast}$,梯度上升最大化$V(G_0,D)$:得到$V(G_0,D_0^{\ast})$是$P{data}(x)$与$P_{G_0}(x)$的JS散度;
- 利用$\thetaG \longleftarrow \theta_G -\eta\partial V(G_0,D_0^{\ast})/\partial \theta_G$ 得到$G_1$;存在的问题是当更新为$G_1$后,$V(G_1,D_0^{\ast})$ 函数下的$D^{\ast}$已经不再是$P{data}(x)$与$P_{G_0}(x)$的JS散度,由下图可知:
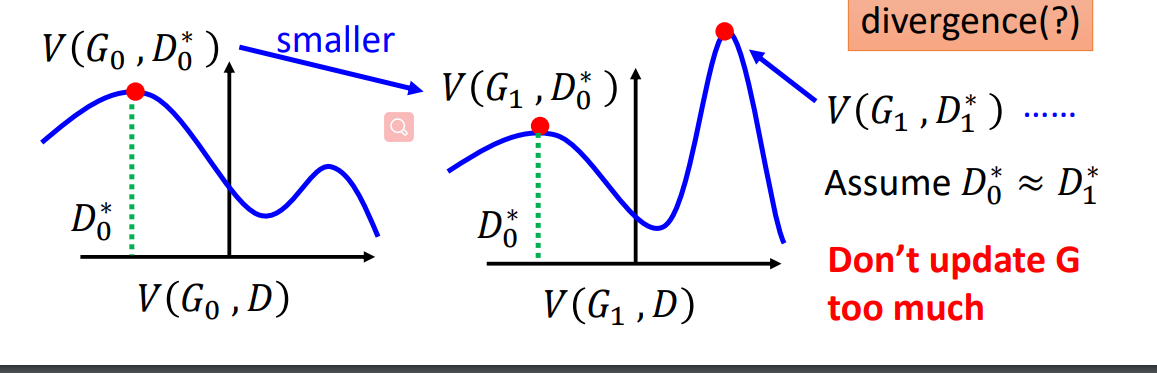
训练$D$要求的是最小化JS散度,当更新为$G_1$后,它的JS散度位置变了,此时再做更新$D_1^{\ast}$若想在上一轮的JS散度处,那么必须假设$D_0^{\ast}=D_1^{\ast}$,换句话说,要先训练判别器$D$多次,再去训练$G$.
下面是整个算法流程图:
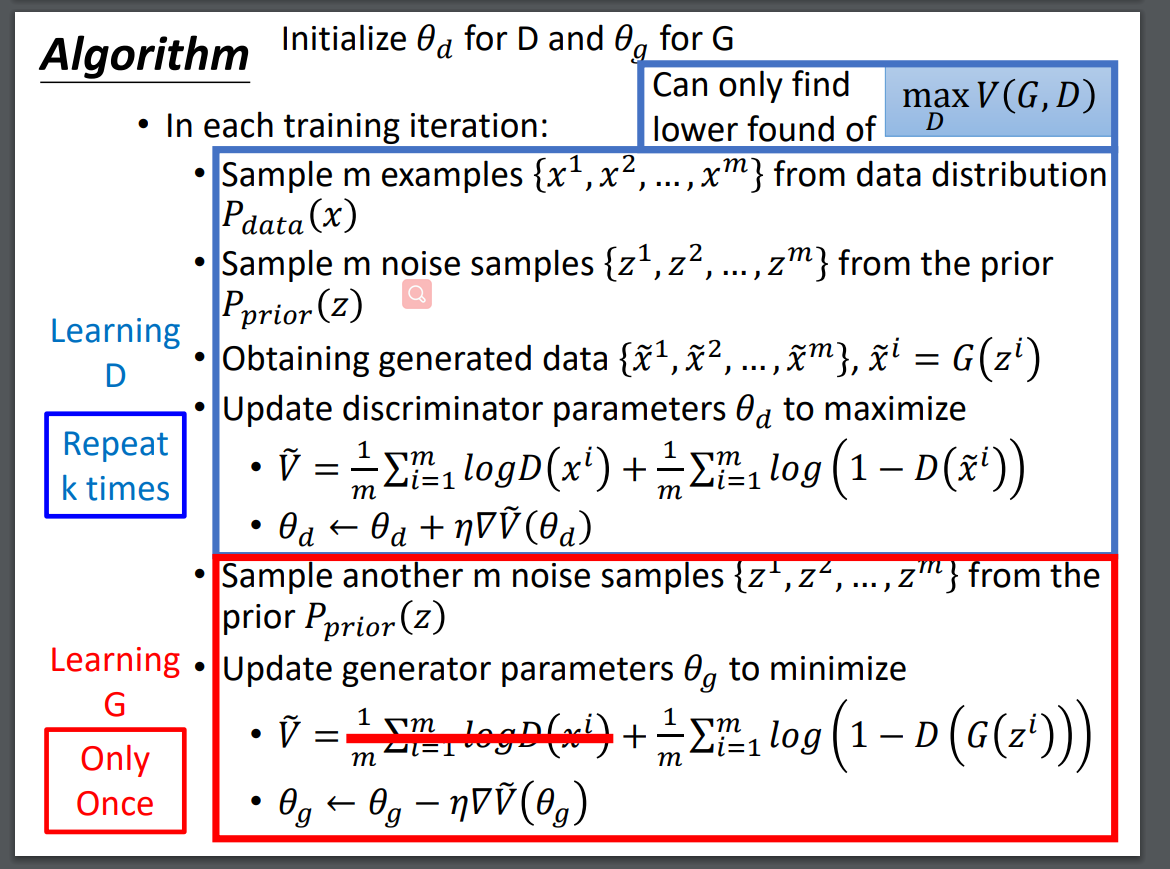
在实际使用的论文代码中,不是用的$V=E{x\sim P{G}}[\log (1-D(x))]$更新生成器,而是用$V=E{x\sim P{G}}[-\log (D(x))]$来更新生成器,此时把来源于$P_G$的标签$x$作为正样本便可。
Tips for Improving GAN
结论是原始GAN的JS散度并不适用,因为真实数据分布,比如图片的分布,实际上是高维空间中的一个低维manifold,因此对整个高维空间中的两个分布$P{G}$还有$P{data}$ ,它们一开始就很大可能一点都不重合(overlap),就算它们会有部分的重合,但实际我们是sampling的方式来近似$P{G}$还有$P{data}$ 的,我们的采样数目也使得我们得不到它们的重合。
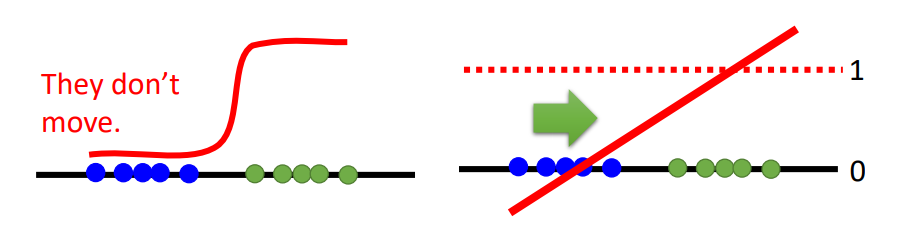
造成的结果就是我们的JS度量一直是$\log 2$,也就是一个常数,也就是如果两个分布不重叠,二分类器可以达到100%的准确率。如下图,这样的话,对于sigmoid函数,蓝色点为生成样本,我们想要的是它沿着sigmoid函数变成绿色训练数据样本点,但是因为它一直被完全判断为负样本,它的更新梯度几乎没有,所以达不到我们想要的效果。
对此有人提出LSGAN(Least Square GAN):把sigmoid分类函数去掉,用线性回归取代。
WGAN
这是一个更好的对GAN的改进方法,它用的是Earth Mover Distance来度量数据分布$P{data}$还有$P{G}$之间的距离。
Earth Mover’s Distance
把分布$P$推成分布$Q$的最小平均距离就是推土机距离,其中有很多推土方案(moving plan),记为$\gamma$,推土方案是可以用一个矩阵表示如下,矩阵中每个元素表示有多少土从$P$移动到$Q$,移动的越多的位置颜色越亮:
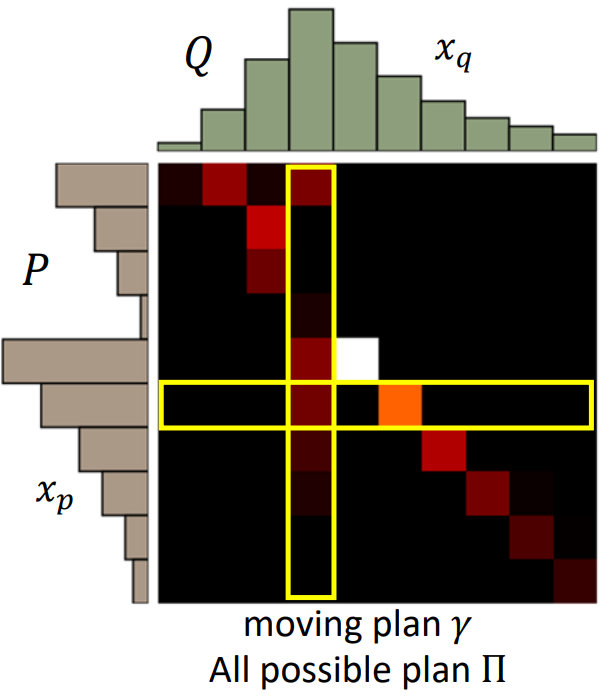
其中一个方案$\gamma$的平均距离为:
推土机距离是最下移动距离(最优)方案:
该wasserstein distance之所以比JS好,是因为$P{G}$与$P{data}$即使没有overlap,我也可以从这个距离看到,它们之间的差异是在降低的,但是对JS的话,可能就会一直是一个常数。
具体添加W距离到GAN的目标函数里:
上面的$\mathrm{1-Lipschitz}$是在说$D$必须是足够smooth的,否则,训练$D$的时候不会拟合,上面的左边会趋向无穷,右边会趋向负无穷。
Lipschitz函数的定义是:
当$K=1$时,上式为$\mathrm{1-Lipschitz}$函数,左边代表的是输出的改变,右边代表的是输入的改变,$\mathrm{1-Lipschitz}$的意思是输出的改变不能太快,应该是不大于输入的改变。
weight clipping
但是这个约束并不好实现,当时的方案称为权重剪裁:强制$D$的权重$W$范围为$|W|<c$便可以了,但是这个并不保证上面的约束成立。
Improved WGAN (WGAN-GP)
A differentiable function is 1-Lipschitz if and only if it has gradients with norm less than or equal to 1 everywhere.
也就是下面的式子等价:
通过在训练$D$的时候添加一个惩罚因子达到这一点:
其中得到分布$P{penalty}$的方式是从$P{data}$与$P{G}$中采样,然后在它们连线上作为分布$P{penalty}$,为什么这样做的原因是:
Given that enforcing the Lipschitz constraint everywhere is intractable, enforcing it only along these straight lines seems sufficient and experimentally results in good performance
而实现的时候采用的是:$(\Vert \nabla_xD(x)\Vert-1)^2$,也就是使得梯度值小于大于1都会有惩罚,而上面的只对大于1的梯度做惩罚。
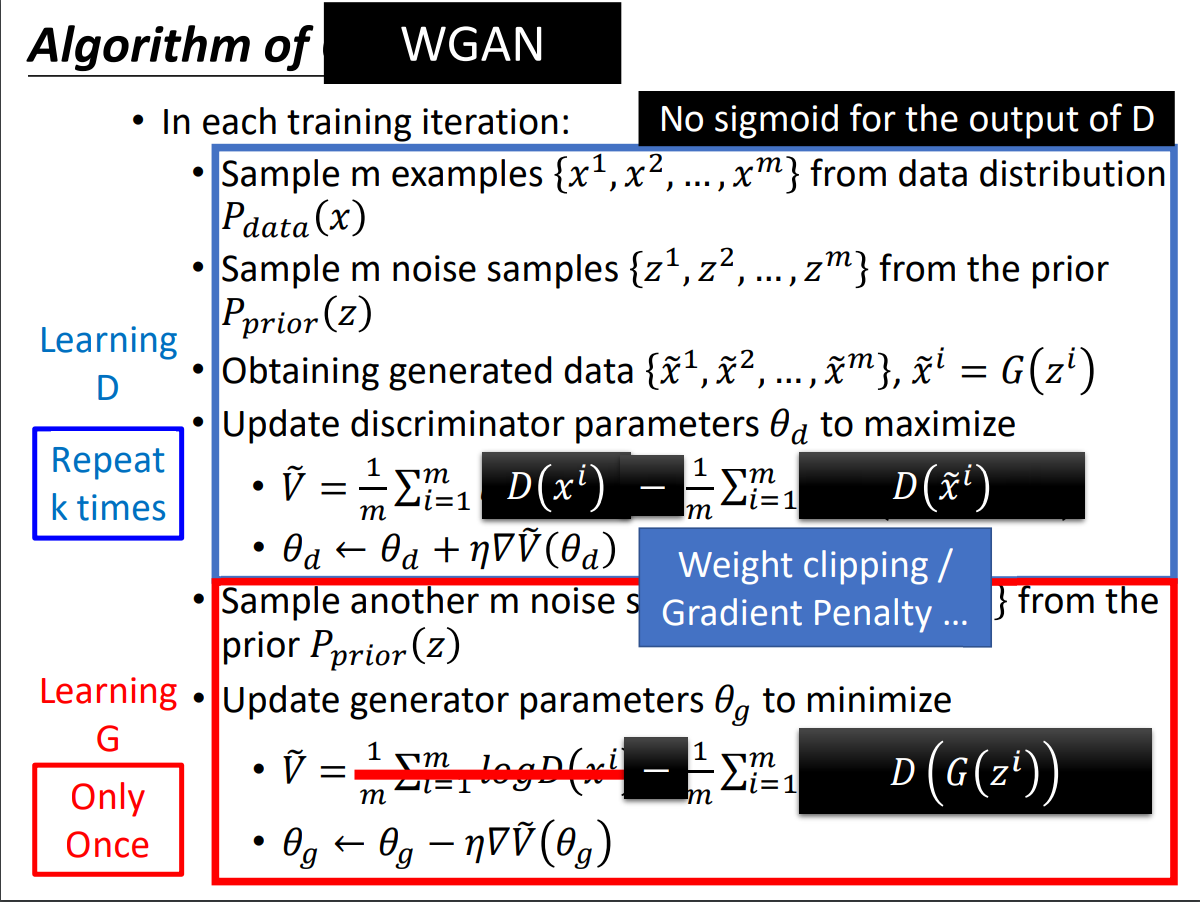
WGAN的算法流程如下:
此外还有Spectrum Norm方法。
Spectral Normalization → Keep gradient norm smaller than 1 everywhere。
Energy-based GAN (EBGAN):替换了判别器$D$的架构,换成了autoencoder。利用自动编码器的负构误差来确定图片的好坏,好处是判别器可以先做预训练。此方法对判别来时$G$的图片不会给出太大的负值。
Loss-sensitive GAN (LSGAN),每次计算$G$更新的好坏程度。